This set of MATLAB Multiple Choice Questions & Answers (MCQs) focuses on “Time Response of Control Systems – 1”.
1. The transient response, yt(t), of a system becomes ____ as t tends to infinity.
a) 0
b) 1
c) Infinity
d) Undefined
View Answer
Explanation: The transient response of a system slowly becomes 0 as the time, for which the input is given, increases. Finally, the total response of the system is only the steady state response.
2. The steady state value of a system is _____ it’s a transient response.
a) dependent on
b) independent of
c) greater than
d) not observable from
View Answer
Explanation: The steady state value of a system is dependent on the transient response of the system since every system goes through a transient state before reaching the steady state. In a design of control systems, we’ve to control the transient response to reduce the steady state error, which occurs due to undesirable transient response.
3. Delay time is the time required by a system to reach a quarter of its steady state value.
a) True
b) False
View Answer
Explanation: The delay time is defined as the time required by the system to reach half of its steady state value. Hence, the above statement is false.
4. For non-unity feedback system, the error is calculated with respect to the reference signal.
a) True
b) False
View Answer
Explanation: The error will be calculated with respect to the actuating signal i.e the feedback signal is either added or subtracted from the reference signal and the error is calculated with respect to the resultant signal. Hence, the above statement is false.
5. What is the output of the following code?
>>p=[0 1]; >> q=[ 1 -1 0]; >> step(p,q)
a) An unstable response
b) A stable response
c) A marginally stable response
d) A marginally unstable response
View Answer
Explanation: We observe that the vector containing the poles, in the step command, signifies a second order system with a pole on the right half of the s-plane. This makes the system unstable and leading to an unstable response.
6. Which of the following command will reveal the damping ratio of the system?
a) damp()
b) damp[]
c) damping{}
d) dr()
View Answer
Explanation: damp() is the correct command to find the damping ration of the system. We need to represent the system by it’s transfer function and give it as an input to the damp() command. The input has to be within parentheses.
7. What is the output of the following code?
>>p=[ 1 0 1]; >> q=[ -1 1]; >> step(p,q);
a) An unstable step response
b) A stable step response
c) Error
d) A marginally unstable response
View Answer
Explanation: We observe that the vector containing zeros, in the step command, reveals that the given system has more zeros than poles. This system output goes to infinity for increasing frequencies and hence MATLAB cannot plot the step response. Thus it’ll give an error.
8. What is the output of the following code?
tf({1},{1 1})
a) Error
b) 1/s+1
c) s+1/1
d) 1/s
View Answer
Explanation: The input vectors, to the tf command, are cellular arrays. This leads to an error because the tf command only takes row vectors. If the vectors were given within [], the output would’ve been 1/s+1.
9. If the damping factor is zero, the unit-step response is
a) Purely sinusoidal
b) Ramp function
c) Pulse function
d) Impulse function
View Answer
Explanation: The generalized time response of a second order control system reduces to a purely sinusoidal function when the damping factor is zero. This is because the damping ratio becomes 0. Hence, the correct option is purely sinusoidal.
10. What is the output of the following code?
impulse([1],[1 1])
a) e-t*u(t)
b) e-t*u(-t)
c) e-t*u(t)
d) e+t*u(t)
View Answer
Explanation: We observe that the given pole zero vectors are suggesting a transfer function of 1/s+1. The impulse response of this system is simply the inverse laplace transform which yields e-t*u(t) as the correct answer while the rest are incorrect.
11. If the damping ratio is equal to 1, a second-order system is _________
a) having maginary roots of the characteristic equation
b) underdamped
c) critically damped with unequal roots
d) critically damped with equal roots
View Answer
Explanation: The time response of a system with a damping ratio of 1 is critically damped. But the roots of the characteristic equation will be equal and equal to negative of the natural undamped frequency of the system.
12. From the following graphs of the generalized transfer function 1/s+a, which plot shows a transfer function with a bigger value of a?
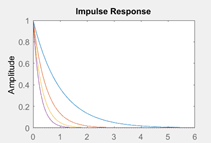
a) Blue plot
b) Red plot
c) Yellow plot
d) Purple plot
View Answer
Explanation: As the value of a increases, the inverse laplace transform of the given transfer function suggests that the e-at value is reducing. Hence for a higher a, the graph reaches a 0 earlier. From the given figure, the purple plot reaches the steady state faster so purple plot is correct only.
13. From the following graphs of the generalized transfer function 1/as2, which plot shows the transfer function for a higher a?
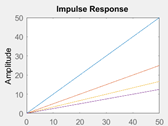
a) Blue
b) Red
c) Yellow
d) Purple
View Answer
Explanation: The impulse response of the given transfer function is a ramp function of slope 1/a. If a increases, the slope decreases. Hence, from the above figure, purple is the correct one.
14. If the damping factor is less than the damping factor at critical damping, the time response of the system is ___________
a) Underdamped
b) Overdamped
c) Marginally damped
d) Unstable
View Answer
Explanation: If the damping factor is less than the damping factor at critical damping i.e. the natural frequency, the damping ratio becomes less than 1. This makes the system underdamped since the response of the system becomes a decaying sinusoid in nature.
Sanfoundry Global Education & Learning Series – MATLAB.
To practice all areas of MATLAB, here is complete set of 1000+ Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
