This set of MATLAB Multiple Choice Questions & Answers (MCQs) focuses on ” Convolution – 2″.
1. After what instant in time will the signal output become zero?
p=conv([ones(1,100)],[ones(1,50),zeros(1,50)]);
a) 150
b) 149
c) 151
d) Error
View Answer
Explanation: The graphical convolution gives an intuitive method to realize such cases. We observe that the second vector completely overlaps the first vector at an instant of 100 units in time. Now since we’ve flipped the second vector, we observe that the pulse of ones leaves the first vector at the instant of 149 units in time and we’re left with zeros. From here on, the output becomes 0 and hence, the correct option is 149.
2. For a causal L.T.I. system, the impulse response is 0 for _________
a) t<0
b) t=0
c) t>0
d) Always
View Answer
Explanation: Since the system is causal, the impulse response won’t exist for t<0. This is because the output of the system should not depend on future inputs. Thus only option t<0 is correct.
3. The convolution of a discrete signal with itself is _________
a) Squaring the signal
b) Doubling the signal
c) Adding two signals
d) is not possible
View Answer
Explanation: This is proved by the fact that since discrete signals can be thought of as a one variable polynomial with the coefficients, along with the order, representing the amplitude, at an instant equal to the order of the variable, of the signal- they are simply multiplied during convolution.
4. The convolution of a function with an impulse function delayed to an instant 3 in time results in ____________
a) An advance in the function by 3 units in time
b) The function itself
c) A delay in the function by 3 units in time
d) Cannot be determined
View Answer
Explanation: The convolution of an impulse function with a function results in the function itself. But if the impulse function is delayed, the output will also get delayed by an equal amount. This is because
∫∞-∞ f(k).δ(t-m-k)dk=f(t-m).
5. What is the output of the following code?
a=con([1 2],[1 2]); b=cconv([1 2],[1 2]);
a) a=b
b) a<b
c) a>b
d) a!=b
View Answer
Explanation: Circular and linear convolution produce the same equivalent results in MATLAB and hence the correct option is a=b. This can also be checked from the tabular method for linear and circular convolution.
6. A continuous signal can be represented as the product of an impulse function and the signal itself.
a) True
b) False
View Answer
Explanation: The continuous signal can be represented as an integral of impulses. This representation buries it down to the form of convolution of two signal where one signal is the impulse function while the other is the continuous signal. Hence, the above statement is true.
7. What is the output of the following code?
cconv([1 2],[0 1 0])
a) [0 1 2 0]
b) [1 2 0 0]
c) [1 2 0 0]
d) [0 0 1 2]
View Answer
Explanation: The signal is getting circularly convolved with a n impulse function which is delayed by 1 unit in time. Hence, the output of the above code will be the original function which gets delayed by 1 unit in time.
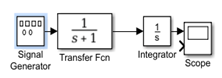
8. What is the Scope value if the signal generator has a frequency of 2 Hz only?
a) An attenuated signal of same frequency
b) The entire signal at the same frequency
c) The entire signal at reduced frequency
d) An attenuated signal at reduced frequency
View Answer
Explanation: The above transfer function is that of a high pass filter. The cut-off frequency for allowing signals is 3Hz but the given signal frequency is that of 2Hz only. If the frequency of the signal generator was more than 2Hz- the output would’ve been entire signal at the same frequency but for >>3Hz. Now, the convolution in time domain is multiplication in frequency domain and the output of the transfer function block is the product of the transfer function and the laplace transform of the sinusoid. It can be checked in MATLAB that the poles of the resultant function will consist of one pole at s=-2+(-).707i which equivalently suggest that there is a 3 db decade if the input frequency becomes less than 2hz.
9. What is the output of the following code?
P=tf([1 2],[3 4]); Q=tf([1 2],[3 4]); Z=P.Q;
a) Z is the response of the system whose pole is at s=-4/3
b) Z is the response of the system whose pole is at s=4/3
c) Z is the response of the system whose poles are at s=-4/3 & s=+4/3
d) Z is the response of the system whose zeros are at s=-4/3
View Answer
Explanation: Z is the multiplication of laplace transform of two sets of two transfer functions. So if they get multiplied, the output can be the response of a system- provided one of the transfer function is the impulse response of a system while the other is just a representation of some signal. Now, this means that the poles of each function is provided in the second row vector of tf() command. This means the pole can possibly be at s=-4/3 since the elements indicate increasing power of s from left to right.
10. What is the inverse laplace transform of Z from the following?
P=tf([1],[1 0 0]); Q=tf([1],[1 0]); Z=P.Q;
a) t2
b) t2/2
c) t3
d) Error
View Answer
Explanation: Z is the convolution of P and Q in time domain which has been done in MATLAB by converting P and Q into the frequency domain and multiplying them. Observing that P and Q are the laplace transform of ramp and step functions respectively, Z is 1/s3. The inverse laplace transform of Z is simply option t2 then.
11. What is the output of the following code?
P=tf([1 2],[3 4]); Q=tf([1 2],[3 4]); Z=P.Q; ilpalace(Z)
a) Error
b) t
c) t2
d) Cannot be determined
View Answer
Explanation: Z is in the tf domain. So, the ilaplace command wont be able to take such variables. We need to write the entire Z as an input to the ilpalace command and then it will give the inverse lapalce transform.
12. What is the output of the following code?
conv[1 2]
a) Error in input
b) Error in []
c) 2
d) 0
View Answer
Explanation: The first error MATLAB notices is that the input to the conv command is given within [] but not () and this is the error it’ll return. The next error is the fact that there is no ‘ , ‘ between 1 and 2 so the conv command doesn’t understand the input.
Sanfoundry Global Education & Learning Series – MATLAB.
To practice all areas of MATLAB, here is complete set of 1000+ Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
