This set of Signals & Systems Interview Questions and Answers focuses on “System Classification and Properties – 2”.
1. Amplifiers, motors, filters etc. are examples for which type of system?
a) Distributed parameter systems
b) Unstable systems
c) Discrete time systems
d) Continuous time systems
View Answer
Explanation: Amplifiers, motors, filters etc. are examples of continuous time systems as these systems operate on a continuous time input signal and produce a continuous time output signal. Whereas discrete time systems operate on discrete time signals, distributed parameter systems have signals which are functions of space as well as time and unstable systems produce unbounded output from bounded or unbounded input.
2. Which among the following systems are described by partial differential functions?
a) Causal Systems and Dynamic systems
b) Distributed parameter systems and linear systems
c) Distributed parameter systems and Dynamic systems
d) Causal systems and linear systems
View Answer
Explanation: In distributed parameter systems, signals are functions of space as well as time. In dynamic systems the output depends on past, present and future values of input, hence, both of these systems are described by differential functions.
3. Which one of the following systems is causal?
a) y(t)=x(t)+x(t-3)+x(t2)
b) y(n)=x(n+2)
c) y(t)=x(t-1)+x(t-2)
d) y(n)=x(2n2)
View Answer
Explanation: A causal system is one in which the output depends on the present or past values of the input, not future. If it depends on future values then it is non-causal. For y(t)=x(t)+x(t-3)+x(t2), y(n)=x(n+2), and y(n)=x(2n2), the output depends on future values i.e., x (t2), x (n + 2) and x (2n2) respectively. Whereas in y(t)=x(t-1)+x(t-2), the output y(t) depends on past values only i.e., x(t – 1) and x(t – 2).
4. Which among the following is not a linear system?
a) y(n) = Cx(2n) + 2D
b) y(t) = \(\int_0^t\) x(w)dw
c) y(t) + 2y(t) = tx(t)
d) y(n) = x(n)coswn
View Answer
Explanation: Here is the Explanation.
A linear system is one which follows the superposition principle i.e., the weighted sum of outputs is a linear function of weighted sum of inputs.
–> y(n)=Cx(2n)+2D
For an input x1(n), y1 (n) = Cx1 (2n)+2D
Similarly, for input x2(n), y2 (n)=Cx2 (2n)+2D
Multiplying first expression with a and second with b;
⇒ ay1 (n)+by2 (n)=aCx1 (2n)+2aD+bCx2 (2n)+2bD is the weighted sum of outputs.
Now, the weighted sum of inputs is y3 (n)=C[ax1 (2n)+bx2 (2n)]+2D
Clearly, the weighted sum of inputs is not equal to weighted sum of outputs.
∴ The system is non-linear.
–> y(t)= \(\int_0^t\)x(w)dw
⇒ y1 (t)= \(\int_0^t\)x1 (w)dw
⇒ y2 (t)= \(\int_0^t\)x2 (w)dw
Weighted sum of outputs → ay1 (t)+by2 (t)= a\(\int_0^t\) x1 (w)dw + b\(\int_0^t\) x2 (w)dw
= \(\int_0^t\) [ax1 (w)+ bx2 (w)]dw
Weighted sum of inputs → y3 (t) = \(\int_0^t\) [ax1 (w)+ bx2 (w)]dw
Clearly, the weighted sum of inputs is equal to weighted sum of outputs.
∴ The system is linear.
Similarly, y(t) + 2y(t) = tx(t) and y(n) = x(n)coswn are linear systems.
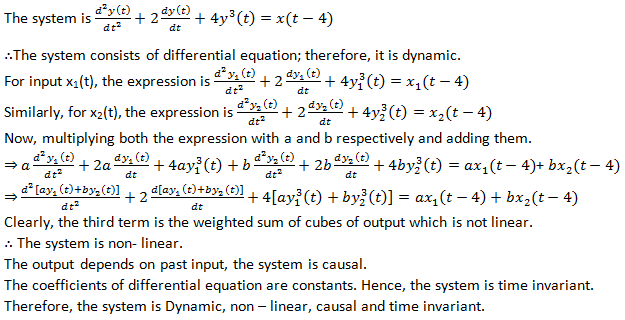
5. Determine the nature of the system, \(\frac{d^2 y(t)}{dt^2}+2 \frac{dy(t)}{dt}+4y^3 (t)=x(t-4)\).
a) Static, linear, causal and time variant
b) Dynamic, non – linear, causal and time invariant
c) Static, non – linear, causal and time variant
d) Dynamic, non – linear, causal and time variant
View Answer
Explanation: Here is the Explanation.
6. Which one of the following is an example of a bounded signal?
a) et coswt
b) et sinw(-t)
c) e-t coswt
d) et cosw(-t)
View Answer
Explanation: A bounded signal is the one which satisfies the condition |x(t)|< M < ∞ for all t.
Clearly, the signals et coswt, et sinw(-t) and et cosw(-t) are exponentially growing signals as the power of the function is positive i.e., the signals will grow beyond infinity. Whereas the signal e-t coswt is an exponentially decaying signal, hence it will decay to zero and will always be less than infinity. Therefore, it is bounded.
7. A system produces zero output for one input and same gives the same output for several other inputs. What is the system called?
a) Non – invertible System
b) Invertible system
c) Non – causal system
d) Causal system
View Answer
Explanation: A system is said to be invertible if the input fed to the system can be retrieved from the output of the system. Otherwise the system is non-invertible. Also, if a system gives zero output for any input and gives the same output for many inputs, then the system is non-invertible.
8. Which among the following is a LTI system?
a) dy(t)/dt+ty(t)=x(t)
b) y(t)=x(t)cosπt
c) y(n)=x(n)+nx(n-1)
d) y(n)=x3 (n+1)
View Answer
Explanation: A system is said to be linear time invariant (LTI) if the input-output characteristics do not change with time.
This expression has a coefficient which is a function of time. ∴ the system is time variant.
Output when input is delayed by T, y(t,T)=x(t-T)cosπt
If the output is delayed by T, y(t-T)=x(t-T)cosπ(t-T)
Clearly, both expressions are not equal ∴ The system is time variant.
Output when input is delayed by N, y(n,N)=x(n-N)+nx(n-1-N)
If the output is delayed by N, y(n-N)=x(n-N)+(n-N)x(n-1-N)
Clearly, both expressions are not equal ∴ The system is time variant.
Output when input is delayed by N, y(n,N)=x3 (n+1-N)
If the output is delayed by N, y(n-N)= x3 (n+1-N)
Clearly, both expressions are equal. ∴ The system is time invariant.
Sanfoundry Global Education & Learning Series – Signals & Systems.
To practice all areas of Signals & Systems for Interviews, here is complete set of 1000+ Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
