This set of Multiple Choice Questions & Answers (MCQs) focuses on “Robotics – Set 3”.
1. What is external to the manipulator and its DOF do not combine with the manipulators DOF?
a) End-effector
b) Wrist
c) Manipulator arm
d) Hand
View Answer
Explanation: End-effector is external to the manipulator and it doesn’t contribute to the manipulability. That is why End-effector’s DOF do not add up with the manipulators DOF.
2. Which of the following is termed as a manipulator part referring to the joints in the kinematic chain between the arm and hand?
a) Wrist
b) Connector
c) Arm
d) Hand
View Answer
Explanation: The wrist of a manipulator is the connection between the kinematic joints of the arm and hand. The wrist joints are nearly always all revolute. It is increasingly common to design manipulators with spherical wrists, i.e., wrists whose three joint axes intersect at a common point.
3. What are end-effectors that grasp or hold the work piece during the work cycle?
a) Grippers
b) Tools
c) Arm
d) Wrist
View Answer
Explanation: Grippers are end-effectors that are used for a wide variety of applications like material handling, machine loading-unloading, palletizing, etc. by grasping or holding the work piece during the work cycle.
4. End-effectors can be categorized as grippers and tools. True or false?
a) True
b) False
View Answer
Explanation: Based on the way the end effector is used they are classified as grippers and tools. Grippers are used for grasping or holding the work piece during the work cycle while the tools perform specific tasks.
5. Which of the following three similar joint axes intersect at a point for a wrist with high dexterity?
a) Revolute
b) Rotary
c) Prismatic
d) Twist
View Answer
Explanation: The wrist with high dexterity is the one where three rotary joint axes intersect at a point. Although this complicates the mechanical design high dexterity is obtained at that point.
6. How many degrees of freedom does a human shoulder have?
a) 1
b) 2
c) 3
d) 4
View Answer
Explanation: A human shoulder is a ball and socket type of joint. Therefore, it has 2 degrees of freedom enabling it to sweep approximately 170 degrees.
7. How many degrees of freedom does a human elbow have?
a) 1
b) 2
c) 3
d) 4
View Answer
Explanation: The human arm, at the end of the arm, with four fingers and a thumb, each have 4 DOF whereas elbow has only 1 DOF because it a simple revolute joint.
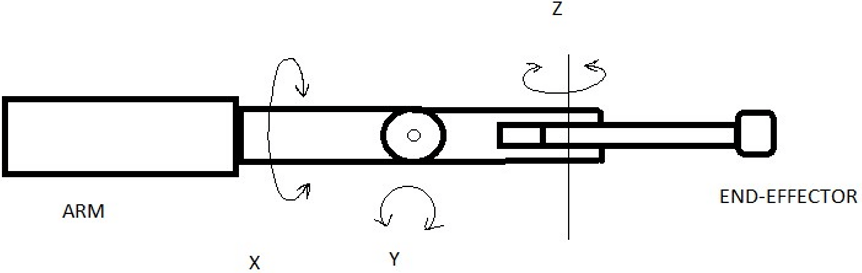
8. What does X, Y and Z indicate in the figure given below?
a) Roll, pitch, and yaw
b) Yaw, pitch and roll
c) Pitch, roll and yaw
d) Roll, yaw, and pitch
View Answer
Explanation: Roll indicates motion in the plane perpendicular to the end of the arm, pitch indicates the motion in vertical plane passing through the arm, and yaw indicates motion in the horizontal plane that also passes through the arm.
9. What is the approximate roll range when human arm is defined from zero reference position?
a) -180 ≤ Roll ≤ +90
b) -90 ≤ Roll ≤ +50
c) -45 ≤ Roll ≤ +15
d) -90 ≤ Roll ≤ +90
View Answer
Explanation: When humans arm’s basic performance specifications are defined from zero reference position, which is the stretched right arm and hand straight out and horizontal with the palm in downward direction. The approximate roll range is -180 ≤ Roll ≤ +90.
10. What is the approximate pitch range when human arm is defined from zero reference position?
a) -180 ≤ Pitch ≤ +90
b) -90 ≤ Pitch ≤ +50
c) -45 ≤ Pitch ≤ +15
d) -90 ≤ Pitch ≤ +90
View Answer
Explanation: Same as how Roll angle range is predicted using humans arm’s basic performance specifications are defined from zero reference position, which is the stretched right arm and hand straight out and horizontal with the palm in downward direction. The approximate pitch range is -90 ≤ Pitch ≤ +50.
Sanfoundry Global Education & Learning Series – Robotics.
To practice all areas of Robotics, here is complete set of Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
