1. The word Robot is derived from the Czech word “Robota” meaning _______
a) Forced labourer
b) Toy
c) Teacher
d) Intelligent worker
View Answer
Explanation: Karel Capek, a Czech writer in his play Rossum’s Universal Robots introduced the word Robot to the world. This word Robot is derived from the Czech word Robota meaning forced labourer.
2. When was the first numerically controlled machine tool developed?
a) 1947
b) 1952
c) 1999
d) 1879
View Answer
Explanation: The first numerically controlled machine tool developed in 1952. Also, in 1954 George Devol designed the first programmable robot.
3. Which generation robots are repeating, non-servo, pick-and-place, or point-to-point kind?
a) First generation
b) Second generation
c) Third generation
d) Fourth generation
View Answer
Explanation: First generation robots are repeating, non-servo, pick-and-place, or point-to-point kind. These machines have the ability to make precise motions at high speed, many times, for a long time.
4. Which generation robots have sensing devices to exhibit path-control capabilities but lack artificial intelligence?
a) First generation
b) Second generation
c) Third generation
d) Fourth generation
View Answer
Explanation: Second generation robots rudimentary machine intelligence with sensuary feedback. A controller processes the data from these sensors and adjusts the operation of the robot accordingly.
5. Which generation robots are acquired with artificial intelligence, self-learning, and conclusion-drawing capabilities by past experiences?
a) First generation
b) Second generation
c) Third generation
d) Fourth generation
View Answer
Explanation: Third generation robots have human like intelligence also called as artificial intelligence, self-learning, and conclusion-drawing capabilities by past experiences. These robots have an ability to respond differently according to the required situation.
6. Who coined the word “Robotics”?
a) Karel Capek
b) Issac Asimov
c) Isaac Newton
d) Elon Musk
View Answer
Explanation: Issac Asimov, well known Russian science fiction writer coined the word robotics in his story “Runaround”. This was published in 1942, to denote the science devoted to study of robots.
7. When was the first servomotor actuated and microcomputer-controlled robots commercially launched?
a) 1959
b) 2001
c) 1999
d) 1974
View Answer
Explanation: The first servomotor actuated and microcomputer-controlled robots commercially launched in 1974 and in 1976 they were used by NASA Viking lander to collect samples from the surface of Mars.
8. A simple mechanical arm is an example of which generation of robots?
a) First generation
b) Second generation
c) Third generation
d) Fourth generation
View Answer
Explanation: First generation robots are repeating, non-servo, pick-and-place, or point-to-point kind. Second generation robots have rudimentary machine intelligence with sensuary feedback. Third generation robots have human like intelligence. Fourth generation robots are futuristic robots which are predicted to be super humanoids capable of producing its own clones. So, it can be concluded that a simple mechanical arm is a first generation of robots.
9. What was Robotics Industries Association (RIA) previously called as?
a) Robotics Initiation Application
b) Robotics Implementation Agency
c) Robotic Institute of America
d) Robotic Institute of Africa
View Answer
Explanation: Robotic Institute of America (RIA), which is now called as Robotics Industries Association, was formed in 1975 as an organization of robot manufacturers and users.
10. By whom was the definition of robot as “A reprogrammable, multifunctional manipulator designed to move material through variable programmed motions for performance of a variety of tasks “defined by _________
a) British Robot Association (RIA)
b) International Standards Organization (ISO)
c) Japanese Industrial Robot Association (JIRA)
d) Robotics Industries Association (RIA)
View Answer
Explanation: The Robotics Industries Association (RIA) of USA defined a robot as ‘A reprogrammable, multifunctional manipulator designed to move material through variable programmed motions for performance of a variety of tasks.
11. Which of the following is not one of the laws of robotics?
a) A robot may not injure a human being or, through inaction, allow a human being to be harmed
b) A robot must obey orders given to it by human beings except where such orders may not injure a human being or, through inaction, allow a human being to be harmed
c) A robot must protect its own existence as long as such protection does not injure a human being or, through inaction, allow a human being to be harmed and must obey orders given to it by human beings except where such orders may not injure a human being or, through inaction, allow a human being to be harmed
d) A robot must make its clones so that the orders given to the robot can be split and the task can be completed faster
View Answer
Explanation: The laws of robotics are:
- A robot may not injure a human being or, through inaction, allow a human being to be harmed.
- A robot must obey orders given to it by human beings except where such orders would conflict with the First Law.
- A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
12. By whom were the laws of robotics framed?
a) Isaac Newton
b) Joseph Engelberger
c) Issac Asimov
d) George D.Devol
View Answer
Explanation: The laws of robotics were framed by Issac Asimov. These were introduced in his 1942 short story “Runaround”.
13. ________ is a machine that has functions similar to human upper limbs, and moves the objects spatially.
a) Manipulator
b) Playback Robot
c) Intelligent Robot
d) Smart Device
View Answer
Explanation: Japan Industrial Robot Association (JIRA) and Japan Industrial Standards Committee defines industrial robot at various levels as manipulator, Playback Robot, and Intelligent Robot. Manipulator is a machine that has functions similar to human upper limbs, and moves the objects spatially. Different types of manipulators have different workspaces.
14. ___________ is a robot that can determine its own behavior and conduct through its functions of sense and recognition.
a) Manipulator
b) Playback Robot
c) Intelligent Robot
d) Smart Device
View Answer
Explanation: Japan Industrial Robot Association (JIRA) and Japan Industrial Standards Committee defines industrial robot at various levels as manipulator, Playback Robot, and Intelligent Robot. Intelligent Robot is a robot that can determine its own behavior and conduct through its functions of sense and recognition.
15. ___________ is a manipulator that is able to perform an operation by reading off the memorized information for an operating sequence, which is learned beforehand.
a) Manipulator
b) Playback Robot
c) Intelligent Robot
d) Smart Device
View Answer
Explanation: Japan Industrial Robot Association (JIRA) and Japan Industrial Standards Committee defines industrial robot at various levels as manipulator, Playback Robot, and Intelligent Robot. Playback Robot is a manipulator that is able to perform an operation by reading off the memorized information for an operating sequence, which is learned beforehand.
16. By whom was the definition “An industrial robot is an automatic, servo-controlled, freely programmable, multipurpose manipulator, with several areas, for the handling of work pieces, tools, or special devices. Variably programmed operations make the execution of multiplicity of tasks possible.” Adopted by?
a) British Robot Association (RIA)
b) International Standards Organization (ISO)
c) Japanese Industrial Robot Association (JIRA)
d) Robotics Industries Association (RIA)
View Answer
Explanation: The definition “An industrial robot is an automatic, servo-controlled, freely programmable, multipurpose manipulator, with several areas, for the handling of work pieces, tools, or special devices. Variably programmed operations make the execution of multiplicity of tasks possible.” was adopted by International Standards Organization (ISO) and agreed upon by most of the users and manufacturers.
17. By whom was the definition of industrial robot as “A reprogrammable device with minimum of four degrees of freedom designed to both manipulate and transport parts, tools, or specialized manufacturing implements through variable programmed motions for performance of specific manufacturing task.” defined?
a) British Robot Association (RIA)
b) International Standards Organization (ISO)
c) Japanese Industrial Robot Association (JIRA)
d) Robotics Industries Association (RIA)
View Answer
Explanation: British Robot Association (RIA) has defined the industrial robot as “A reprogrammable device with minimum of four degrees of freedom designed to both manipulate and transport parts, tools, or specialized manufacturing implements through variable programmed motions for performance of specific manufacturing task.”
18. By whom was the definition of robot as “A reprogrammable, multifunctional manipulator designed to move material through variable programmed motions for performance of a variety of tasks “defined by?
a) British Robot Association (RIA)
b) International Standards Organization (ISO)
c) Japanese Industrial Robot Association (JIRA)
d) Robotics Industries Association (RIA)
View Answer
Explanation: The Robotics Industries Association (RIA) of USA defined a robot as ‘A reprogrammable, multifunctional manipulator designed to move material through variable programmed motions for performance of a variety of tasks.
19. Washing machine is a Robot. True or false?
a) True
b) False
View Answer
Explanation: A washing machine meets the basic definition of being a programmed machine and performs complex tasks but it is not a robot because additional characteristics differentiate a robot from a complex machine. Robots have an ability to respond to its environment autonomously to alter its program and complete a task, and it recognizes when a task is complete but a washing machine cannot do it, that is, it cleans the clothes only for the set time even if they are already clean or still dirty.
20. In which of the following areas are Robots currently being used?
a) Industry
b) Medicine
c) Consumer electronics
d) All of these
View Answer
Explanation: Robots were put to use in industry early on, beginning with Unimate, a robot designed by George Devol in 1959 for General Motors. Robots perform surgery, automatically disinfect hospitals, and perform various other tasks in medicine field. One of the common example of consumer electronic robots is Roomba vacuum cleaner and many robotic arms are used to print electronics as well.
21. How many Degrees of freedom (DOF) does a prismatic and revolute joint have respectively?
a) 1, 1
b) 2, 1
c) 1, 2
d) 2, 2
View Answer
Explanation: A prismatic joint provides a linear sliding movement between two bodies, so it has only one degree of freedom. A revolute joint has one degree of freedom and provides single axis rotation.
22. How many degrees of freedom does a spatial manipulator have?
a) 3
b) 6
c) 9
d) 12
View Answer
Explanation: A spatial manipulator has 6 degrees of freedom to position and orient a body freely in 3-D space. A spatial manipulator has 3 degrees of freedom to position itself along x, y and z principal axes and 3 degrees of freedom to orient itself along the principal axes.
23. How many degrees of freedom does the following figure have?
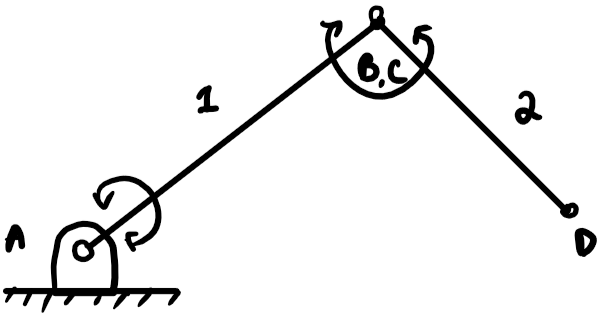
a) 2
b) 3
c) 6
d) 9
View Answer
Explanation: 2 degrees of freedom are present in the above figure. There are two links and two joints. Since the above mechanism shows two joints which are both revolute joints so it can be concluded that the above figure has 2 degrees of freedom.
24. How many degrees of freedom with respect to coordinate frame are represented in the below figure?
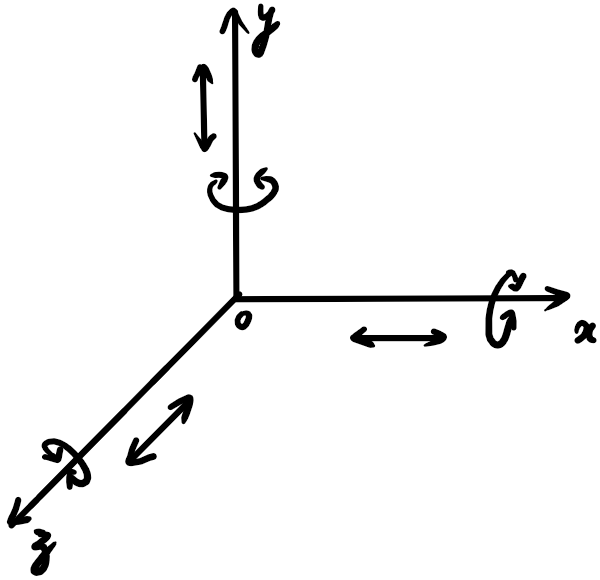
a) 3
b) 6
c) 9
d) 12
View Answer
Explanation: 6 degrees of freedom with respect to coordinate frame are represented. Three translations representing linear motions along three perpendicular axes to specify the position of body in space, and three rotations representing angular motions along three perpendicular axes to specify the orientation of body in space.
25. How many degrees of freedom does an object in 2D space have?
a) 1
b) 2
c) 3
d) 6
View Answer
Explanation: An object in 2D space has 3 degrees of freedom, that is, two translation and one rotational. For example, consider a body respecting on a table, it is said to have 3 degrees of freedom because it can move in the x and y direction and can orient its angle in x-y plane.
26. How many degrees of freedom does a rigid body free in 3D space have?
a) 3
b) 6
c) 9
d) 12
View Answer
Explanation: A rigid body free in space has six degrees of freedom, that is, three translations representing linear motions along three perpendicular axes to specify the position of body in space and three rotations representing angular motions along three perpendicular axes to specify the orientation of body in space.
27. The difficulty of controlling a manipulator increases rapidly with the number of links.
a) True
b) False
View Answer
Explanation: It is true, the difficulty of controlling a manipulator increases rapidly with the number of links. As the number of links increases the complexity increases as the degrees of freedom increases enable movement in many directions.
28. How many joints does an open serial kinematic chain of n-degrees of freedom manipulator arm consist?
a) n+1
b) n-1
c) n-2
d) n
View Answer
Explanation: An open serial kinematic chain is a kinematic chain where one link that is the unitary link is connected to a single joint. So, an open serial kinematic chain of n-degrees of freedom manipulator arm consists of n joints.
29. ___________ implies that the manipulator can reach a subspace, which is obstructed by objects, by the capability of going around those without losing any degrees of freedom?
a) Dexterity
b) Redundancy
c) Reachability
d) Rigidity
View Answer
Explanation: Dexterity implies that the manipulator can reach a subspace, which is obstructed by objects, by the capability of going around those. The extra degrees of freedom enhance the performance by adding to its dexterity.
30. How many links does a kinematically redundant manipulator have?
a) Only one
b) Three
c) Five
d) More than six
View Answer
Explanation: A manipulator having more than six links is referred to as a kinematically redundant manipulator. This means that the manipulator has more degrees of freedom then required to execute a given task.
31. The ___________ of a manipulator is the total volume swept out by the end-effector as the manipulator executes all possible motions.
a) Workspace
b) Work envelope
c) Work load
d) Workplace
View Answer
Explanation: According to the definition, workspace of a manipulator is the total volume swept out by the end-effector as the manipulator executes all possible motions. There are two types of workspaces-reachable and dexterous.
32. The surface of the workspace describes a __________
a) Work surface
b) Work envelope
c) Work load
d) Workplace
View Answer
Explanation: The workspace of a manipulator is the total volume swept out by the end-effector as the manipulator executes all possible motions. The surface of the workspace describes work envelope.
33. The ___________ is the entire set of points reachable by the manipulator.
a) Dextrous workspace
b) Redundancy
c) Reachable workspace
d) Spatial area
View Answer
Explanation: The Reachable workspace is the entire set of points reachable by the manipulator. For a manipulator to reach a reachable workspace, it might lose degrees of freedom, i.e. the end effector can just reach it but cannot perform all operations.
34. The ___________ consists of those points that the manipulator can reach with an arbitrary orientation of the end-effector.
a) Dextrous workspace
b) Redundancy
c) Reachable workspace
d) Spatial area
View Answer
Explanation: Dextrous workspace consists of those points that the manipulator can reach with an arbitrary orientation of the end-effector, i.e., a set of points can be reached without losing any degree of freedom.
35. The dextrous workspace is a subset of the reachable workspace.
a) False
b) True
View Answer
Explanation: Dextrous workspace consists of those points that the manipulator can reach with an arbitrary orientation of the end-effector, i.e., a set of points can be reached without losing any degree of freedom. The Reachable workspace is the entire set of points reachable by the manipulator. Hence it can be concluded that dextrous workspace is a subset of the reachable workspace.
36. The workspace of a PPP manipulator is ______________
a) Cylindrical workspace
b) Cuboidal workspace
c) Spherical workspace
d) No workspace
View Answer
Explanation: The workspace of a PPP manipulator, that is, a manipulator with three prismatic joints has a cuboidal workspace. One of the prismatic joint is permits translation in x direction, second prismatic joint permits translation along y direction and the third in z direction, creating a cuboidal workspace.
37. The work volume of articulated manipulator configuration is of which shape?
a) Cylindrical
b) Cuboidal
c) Spherical
d) Pyramid
View Answer
Explanation: An articulated manipulator consists of three revolute joint. The work volume of articulated manipulator configuration is spherical in shape.
38. “The Cartesian configuration gives large work volume but has low dexterity when compared to Gantry configuration.” True or False?
a) False
b) True
View Answer
Explanation: Although both Cartesian and Gantry configuration have 3 prismatic joints there is difference in work volume. The Cartesian configuration gives large work volume but has low dexterity when compared to Gantry configuration due to the arrangement of the prismatic joints.
39. What is the workspace of SCARA (Selective Compliance Assembly Robot Arm)?
a) Cylindrical workspace
b) Cuboidal workspace
c) Spherical workspace
d) No workspace
View Answer
Explanation: A SCARA manipulator consist of RPR configuration, that is it consists of two revolute and one prismatic joint whose axes are parallel. So, the workspace obtained is cylindrical.
40. The workspace of an RPP manipulator is ___________
a) Cylindrical workspace
b) Cuboidal workspace
c) Spherical workspace
d) No workspace
View Answer
Explanation: The workspace of an RPP manipulator is cylindrical since the manipulator consists of one revolute and two prismatic joints. The cylindrical configuration uses two perpendicular prismatic joints, and a revolute joint such that the perpendicular prismatic joints slide on the revolute joint.
More MCQs on Robotics:
- Robotics MCQ (Set 2)
- Robotics MCQ (Set 3)
- Robotics MCQ (Set 4)
- Robotics MCQ (Set 5)
- Robotics MCQ (Set 6)
- Robotics MCQ (Set 7)
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
