This set of Mechanical Vibrations Multiple Choice Questions & Answers (MCQs) focuses on “Free Vibration of Single Degree of Freedom Systems”.
1. Free Vibrations occur in the absence of an external excitation
a) Yes
b) No
View Answer
Explanation: Free Vibrations are oscillations from a system equilibrium position that occurs in the absence of an external excitation.
2. When the block is drawn from its equilibrium position, a potential energy developed in the—-
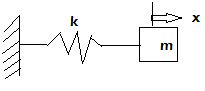
a) Spring
b) Block
c) Spring is kx2
d) Block is kx2/2
View Answer
Explanation: When the block is displaced a distance of x from its equilibrium position , a potential energy kx2/2 is developed in the spring.
3.The differential equation governing free vibrations of a linear system are derived in the form——
a) meq x.. + ceq x. + keq x = 0
b) ceq x.. + meq x. + keq x = 0
c) meq x.. – ceq x. + keq x = 0
d) meq x.. + keq x. + ceq x = 0
View Answer
Explanation: Free Vibrations of SDOF system are described by a homogenous second-order ordinary differential equation. The differential equation governing free vibrations of a linear system are derived and shown to have the form meq x.. + ceq x. + keq x = 0
4. Free Vibrations of a Single Degree of Freedom system are described by a ——————-
a) Homogenous First order differential equation
b) Homogenous Second order ordinary differential equation
c) Cartesian equation
d) First order differential equation
View Answer
Explanation: Free Vibrations of SDOF system are described by a homogenous second-order ordinary differential equation . The independent variable is time and while the dependent variable is the chosen generalized coordinate.
5. Free Vibrations are the result of a kinetic energy imparted to the system
a) True
b) False
View Answer
Explanation: Free Vibrations are a result of displacement from the equilibrium position that leads to a difference in potential energy from the system’s equilibrium position or it is a result of kinetic energy imparted to the systems.
Common data questions from 6 to 8
The differential equation governing free vibrations of a linear system are derived in the form
meq x.. + ceq x. + keq x = 0
6. The Second derivative term is due to—–
a) External forces
b) Velocity
c) Inertia Forces
d) Displacement
View Answer
Explanation: The Second derivative term of meq x.. + ceq x. + keq x = 0 is due to the inertia forces or effective forces of the system.
7. The first derivative term is due to ——-
a) Velocity
b) Viscous damping
c) Elastic forces
d) Displacement
View Answer
Explanation: The First derivative term of meq x.. + ceq x. + keq x = 0 is due to presence of viscous damping in the system.
8. The Zeroth derivative term is due to
a) Velocity
b) Viscous damping
c) Elastic forces
d) Displacement
View Answer
Explanation: The Zeroth derivative term of meq x.. + ceq x. + keq x = 0 is due to presence of elastic forces in the system.
9. The differential equation governing free vibrations of a linear system are derived in the parameters damping ratio, natural frequency is———–
a) x.. – 2 ζ ωn x. – ωn2 x = 0
b) x.. + 2 ζ ωn x. – ωn2 x = 0
c) x.. – 2 ζ ωn x. + ωn2 x = 0
d) x.. + 2 ζ ωn x. + ωn2 x = 0
View Answer
Explanation: The differential equation in terms of parameters damping ration, natural frequency is
x.. + 2 ζ ωn x. + ωn2 x = 0 . It is the standard form of differential equation for single degree of freedom systems.
Common data questions from 10 to 12
The differential equation governing free vibrations of a linear system are derived in the form
meqx.. + ceq x. + keq x = 0
10. If the energy method is used to derive the differential equation, the Second derivative term is due to—–
a) External forces
b) Kinetic Energy
c) Inertia Forces
d) Displacement
View Answer
Explanation: If the energy method is used to derive the differential equation, the second derivative term is a result of the system’s kinetic energy.
11. The first derivative term is due to ——-
a) Viscous friction forces
b) Viscous damping
c) Elastic forces
d) Displacement
View Answer
Explanation: If the energy method is used to derive the differential equation, the First derivative term is a result of the work done by the viscous friction forces.
12. The Zeroth derivative term is due to
a) Potential Energy
b) Viscous damping
c) Elastic forces
d) Displacement
View Answer
Explanation: If the energy method is used to derive the differential equation, the zeroth derivative term is a result of the system’s potential energy.
Common data for question 13 & 14
The differential equation governing the single degree of freedom system is 5x.. + 4 x. + 7 x = 0
13. Find the natural frequency of motion
a) 3.183
b) 2.183
c) 1.183
d) 0.183
View Answer
Explanation:
The natural frequency of motion is given by ωn = √ ( keq/meq)
Substituting the values, we have ωn = √(7/5)
= 1.183 rad/s14. Find the damping ratio
a) 0.008
b) 0.338
c) 0.118
d) 0.228
View Answer
Explanation:
The damping ratio is given by ζ = ceq / ( 2 √(k<sub>eq</sub>m<sub>eq</sub>) )
Substituting the values, we have , ζ = 4 / ( 2 √ (7×5))
= 0.33815. The differential equation governing the angular oscillation of the compound pendulum is
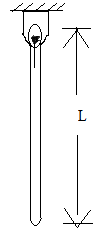
a) m (L2/3) ӫ – mg (L/2) sin ө
b) m (L2/3) ӫ + mg (L2/2) sin ө
c) m (L/3) ӫ + mg (L/2) sin ө
d) m (L2/3) ӫ + mg (L/2) sin ө
View Answer
Explanation: let ө(t) be the counter clockwise angular displacement of the rod measure from its equilibrium position. summing moments about O ( at rigid ) using the free body diagram, we obtain differential equation is m (L2/3) ӫ + mg (L/2) sin ө.
Sanfoundry Global Education & Learning Series – Mechanical Vibrations.
To practice all areas of Mechanical Vibrations, here is complete set of Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
