This set of Theory of Machines Multiple Choice Questions & Answers (MCQs) focuses on “Planar, Spherical and Spatial Motion”.
1. If the relative motions of the rigid bodies are in one plane or in parallel planes, then the mechanism is called
a) spherical mechanism
b) planar mechanism
c) spatial mechanism
d) flexure mechanism
View Answer
Explanation: In a planar mechanism, all particles describe plane curves in space and all the curves lie in a single or parallel planes. The relative motions are constrained to a single plane. Hence, the planar mechanism is a 2 – D mechanism.
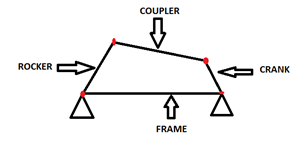
2. Which mechanism is shown in the given diagram?
a) spatial
b) spherical
c) planar
d) flexure
View Answer
Explanation: The given diagram is of a plane four bar linkage which is included under planar mechanisms as the motions are constrained in a single plane. Thus, it is planar.
3. Which of the following are not included under planar mechanisms?
a) Hooke’s universal joint
b) Plate cam and follower
c) Plane four bar linkage
d) Slide crank mechanism
View Answer
Explanation: Hooke’s universal joint is an example of spherical mechanism as the relative motion of the particles is three dimensional, whereas the rest are examples of planar mechanisms (the relative motion is two dimensional.)
4. Coplanar motion is the motion transformation of any planar mechanism. True or false?
a) True
b) False
View Answer
Explanation: As all the relative motions of the rigid bodies are in a single plane or in parallel plane, the motion transformation is coplanar. Thus, the statement is true.
5. In a mechanical system, if the bodies move in a way such that the trajectories of points in the system lie on concentric sphere, then the mechanism is called
a) spatial mechanism
b) flexure mechanism
c) planar mechanism
d) spherical mechanism
View Answer
Explanation: In a spherical mechanism, the locus of every point is a curve contained in a spherical surface. These spherical surfaces are concentric.
6. Hooke’s universal joint is an example of spatial mechanism. True or false?
a) True
b) False
View Answer
Explanation: Hooke’s universal joint is a joint in a rigid rod which allows the rod to bend in any direction. It is included under spherical mechanisms. Thus, the given statement is false.
7. A mechanism where there are no restrictions on the relative motion between the particles, the mechanism is called
a) planar mechanism
b) flexure mechanism
c) spherical mechanism
d) spatial mechanism
View Answer
Explanation: The relative motion can be random in a spatial mechanism. It is not necessary for the motion transformation to be coplanar or concentric. Spatial mechanism can move in any of the three dimensions.
8. Planar mechanisms and spherical mechanisms are included under spatial mechanisms. True or false?
a) True
b) False
View Answer
Explanation: The relative motion between particles can be the same as that of planar mechanisms (coplanar) or spherical mechanism (concentric). Thus, planar and spherical mechanisms are included under spatial mechanism.
9. Planar mechanisms are ___________ dimensional whereas spatial mechanisms are ___________ dimensional.
a) 1, 2
b) 2, 1
c) 2, 3
d) 3, 2
View Answer
Explanation: Planar mechanisms are restricted in a single plane and spatial mechanisms have no such restriction. The relative motion between particles in a spatial mechanism is not in the same or parallel planes. Thus, planar mechanisms are 2 dimensional whereas spatial mechanisms are 3 dimensional.
10. A linkage containing a screw pair is an example of
a) Planar mechanism
b) Spatial mechanism
c) Flexure mechanism
d) Spherical mechanism
View Answer
Explanation: Relative motion within a screw pair is helical. It is not constrained to one plane. Hence, a linkage containing a screw pair is an example of spatial mechanism.
Sanfoundry Global Education & Learning Series – Theory of Machines.
To practice all areas of Theory of Machines, here is complete set of 1000+ Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
- Practice Mechanical Engineering MCQs
- Check Mechanical Engineering Books
- Apply for Mechanical Engineering Internship
- Check Agricultural Engineering Books
- Practice Agricultural Engineering MCQs
