This set of Theory of Machines Multiple Choice Questions & Answers (MCQs) focuses on “Mobility”.
1. Mobility is different than the number of degrees of freedom. True or false?
a) True
b) False
View Answer
Explanation: The mobility or number of degrees of freedom of a rigid body is defined as the number of independent movement the body has. The number of parameters that must be controlled independently to get the device in a particular position is mobility. Mobility and number of degrees of freedom are the same thing.
2. According to Kutzbach criterion, the mobility of a rigid body is given by the formula:
a) 3(n+1)-2j1-j2
b) 3(n+1)+2j1+j2
c) 3(n-1)+2j1+j2
d) 3(n-1)-2j1-j2
View Answer
Explanation: The Kutzbach criterion is used to determine the number of degree of freedoms of a kinematic chain or a linkage. According to Kutzbach criterion, mobility (m) = 3(n-1)-2j1-j2; where n = number of links, j1 = number of lower pairs, j2 = number of higher pairs.
3. What is the equation for Grubler’s criterion for plane mechanisms with constrained motion?
a) 3n-2j1-4=0
b) 3n-3j1-4=0
c) 3n+2j1+4=0
d) 3n+3j1+4=0
View Answer
Explanation: Equation for Grubler’s criterion for plane mechanisms with constrained motion can be derived by putting m = 1 and j2 = 0 in the equation of mobility according to Kutzbach criterion.
1 = 3(n-1)-2j1-0
Therefore, 3n-2j1-4=0
4. State the three dimensional form of Kutzbach criterion.
a) 6(n-1)+5j1+4j2+3j3+2j4+j5
b) 6(n-1)-5j1-4j2-3j3-2j4-j5
c) 6(n+1)+5j1+4j2+3j3+2j4+j5
d) 6(n+1)-5j1-4j2-3j3-2j4-j5
View Answer
Explanation: According to the three dimensional form of Kutzbach criterion, mobility (m) = 6(n-1)-5j1-4j2-3j3-2j4-j5. It is also called as Kutzbach criterion to determine the degree of freedom of a spatial mechanism.
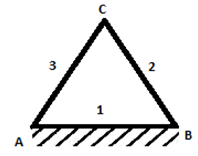
5. Find the mobility of the following three bar mechanism.
a) 3
b) 2
c) 0
d) 1
View Answer
Explanation: Here, n = 3, j1 = 3, j2 = 0.
Hence, m = 3(3-1)-(2×3)-0 = 0
As the degree of freedom is 0, there is no relative motion between the links and the mechanism forms a structure.
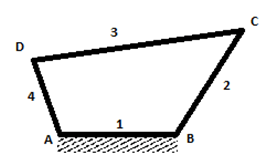
6. Find the mobility of the given mechanism.
a) 0
b) 1
c) 2
d) 3
View Answer
Explanation: Here, n = 4, j1 = 4, j2 = 0.
Hence, m = 3(4-1)-(2×4)-0 = 1
As the degree of freedom is 1, the mechanism can be brought into motion by a single input motion.
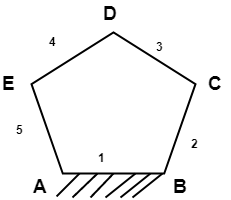
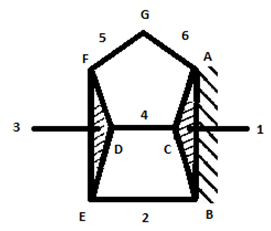
7. Find the mobility of the given mechanism.
a) 0
b) 1
c) 2
d) 3
View Answer
Explanation: Here, n = 5, j1 = 5, j2 = 0.
Hence, m = 3(5-1)-(2×5)-0 = 2
As the degree of freedom is 2, two separate input motions are required to produce constrained motion for the mechanism.
8. If there are redundant constraints in the chain and it forms a statically indeterminate structure, what is the degree of freedom or the mobility of this structure?
a) 0
b) 1
c) 2
d) Less than 0
View Answer
Explanation: If n ≤-1, then there are redundant constraints in the chain and a statically indeterminate structure is formed. The structure is called a preloaded structure as some stress is created within the link so that it has negative mobility.
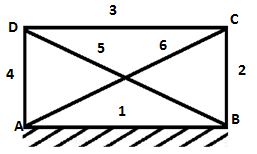
9. Find the mobility of the given mechanism
a) -2
b) 2
c) -1
d) 1
View Answer
Explanation: Here, n = 6, j1 = 8, j2 = 0.
Hence, m = 3(6-1)-(2×8)-0 = -1
The degree of freedom is -1, thus there are redundant constraints in the chain and a statically indeterminate structure is formed.
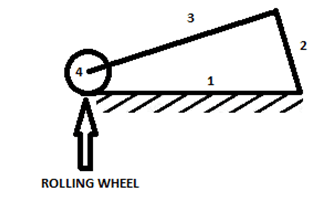
10. Find the mobility of the following mechanism with a higher pair.
a) 3
b) -1
c) 1
d) 2
View Answer
Explanation: Here, n = 4, j1 = 3, j2 = 1.
Hence, m = 3(4-1)-(2×3)-1 = 2
The degree of freedom or mobility is 2.
11. Find the mobility of the given mechanism
a) 1
b) 3
c) 2
d) 0
View Answer
Explanation: Here, 1 and 3 form ternary joints.
Hence, n = 6, j1 = 7, j2 = 0.
Hence, m = 3(6-1)-(2×7)-0 = 1
The degree of freedom or mobility is 1.
12. State the equation for the three dimensional form of Grubler’s criterion.
a) 6n-5j1-7=0
b) 6n-6j1-6=0
c) 6n+5j1+7=0
d) 6n+6j1+6=0
View Answer
Explanation: Equation for three dimensional form of Grubler’s criterionfor plane mechanisms with constrained motion can be derived by putting m = 1 and j2= j3 = j4 = j5 = 0 in the equation of mobility according to three dimensional form of Kutzbach criterion.
1 = 6(n-1)-5j1-(4×0)-(3×0)-(2×0)-0
Therefore,6n-5j1-7=0.
Sanfoundry Global Education & Learning Series – Theory of Machines.
To practice all areas of Theory of Machines, here is complete set of 1000+ Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
- Apply for Agricultural Engineering Internship
- Check Mechanical Engineering Books
- Practice Mechanical Engineering MCQs
- Practice Agricultural Engineering MCQs
- Apply for Mechanical Engineering Internship
