This set of Basic Avionics Questions and Answers focuses on “Redundancy and Failure Survival in FBW”.
1. What is the failure probability figure of a commercial aircraft?
a) 1×10-4/hr
b) 1×10-6/hr
c) 1×10-11/hr
d) 1×10-20/hr
View Answer
Explanation: The statistical level of safety currently being achieved with civil aircraft transport corresponds to a figure of around 1 × 10-6/hour. This figure is derived from the total number of civil aircraft crashes occurring in a year from all causes divided by the total number of aircraft flying and their annual operating hours.
2. What is MTBF?
a) Mean Time Before Fracture
b) Minimum Time Between Failures
c) Maximum Time Between Failures
d) Mean Time Between Failures
View Answer
Explanation: MTBF is abbreviated as Mean Time Between Failures. It is the predicted time between two inherent failures of a system. The mean time between failures, or MTBF, of a single channel FBW system is in the region of 3,000 hours. The FBW system must thus possess redundancy with multiple parallel channels so that it is able to survive at least two failures if these very low failure probability figures are to be met.
3. What is called a quadruplex system?
a) System with 4 channels
b) System with 8 channels
c) System which does not fail
d) System with 4 times the speed
View Answer
Explanation: A well established redundant system comprises four totally independent channels of sensors and computers in a parallel arrangement to give the required failure survival capability – such a configuration is referred to as a quadruplex system.
4. In a quadruplex system, when does a passive fail situation occur?
a) When all the channels fail
b) When 3 channels fail and none is disconnected
c) When 2 channels fail none is disconnected
d) When 1 channel fail none is disconnected
View Answer
Explanation: When two channels fail and are not disconnected, two good channels versus two failed hard over channels so that the control surface does not move resulting in a ‘fail passive’ situation. When one channel fails and is not disconnected, the other three good channels overrides the failed one.
5. Which of the following uses a monitoring system to check the function of channels?
a) Matching triplex
b) Monitored triplex
c) Master triplex
d) Major triplex
View Answer
Explanation: The incorporation of a monitoring system to check the correct functioning of a channel to a very high confidence level can also enable a failed channel to be identified and disconnected and this leads to an alternative failure survival configuration known as ‘monitored triplex’. A monitored triplex configuration comprises three totally independent parallel channels with each channel monitored by a dissimilar system to detect a failure.
6. Complete the signal flow diagram for a monitored system
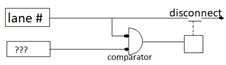
a) Lane
b) Flight control computer
c) Monitor
d) Error compensator
View Answer
Explanation: The signal lane is the main channel carrying the signal. It is monitored by a monitor which checks the signal. If the signal is incorrect it is disconnected and the next channel takes over.
7. What type of system does the figure represent?
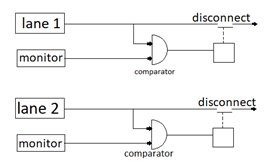
a) Monitored system
b) Duplex system
c) Monitored duplex system
d) Monitored diplex system
View Answer
Explanation: A monitored system uses signal monitors to identify error in the signal. If an error is identified the main signal is disconnected and the next channel takes over. Since there are two channels in the above system it is a monitored duplex system.
8. How is failure detected in a quadruplex system?
a) Cross comparing signals and voting
b) Monitoring signals
c) Adding signals
d) Subtracting signals
View Answer
Explanation: Failure signals are detected by cross comparison and majority voting. In a quadruplex system, every channel cross compares every other channel to detect a failure in its own channel. For example, if three channel has signal ‘x’ and one has signal ‘y’, the majority signal is voted as good and the channel with signal ‘y’ is disconnected.
9. What are C 1, C 2, C 3, C 4 in the following diagram of the quadruplex system?
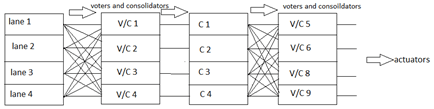
a) Computer
b) Power control unit
c) Monitor
d) Blank box
View Answer
Explanation: The signal from the lane passes through the voter and consolidator for cross comparison of signals. These signals are then passed on to the computer which applies control laws and calculates the amount of deflection required by the actuator. The signal passes through another set of voter and consolidator for errors before passing to on to the actuator.
10. Which of the following is not a common mode failure?
a) Lightning strike
b) Fire/explosion/battle damage
c) Bird strike
d) Incorrect maintenance
View Answer
Explanation: The type of failure which can affect all systems at the same time is termed a Common Mode Failure. Examples of common mode failures are the Lightning strike, Electro-magnetic interference, Fire/explosion/battle damage, Incorrect maintenance, Common design errors – e.g., software.
Sanfoundry Global Education & Learning Series – Avionics.
To practice basic questions and answers on all areas of Avionics, here is complete set of 1000+ Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
- Practice Aerospace Engineering MCQs
- Check Avionics Books
- Practice Aeronautical Engineering MCQs
- Check Aeronautical Engineering Books
- Apply for Aerospace Engineering Internship
