This set of Avionics Problems focuses on “Autopilots, Height Control and Heading Control”.
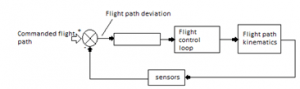
1. What is missing in the autopilot loop?
a) Autopilot
b) Flight Management System
c) FBW system
d) FBL system
View Answer
Explanation: The basic function of the autopilot is to control the flight of the aircraft and maintain it on a predetermined path in space without any action being required by the pilot. The autopilot can thus relieve the pilot from the fatigue and tedium of having to maintain continuous control of the aircraft’s flight path on a long duration flight so the pilot can concentrate on other tasks and the management of the mission.
2. Which of the following is not one of the functions performed by the FMS?
a) Automatic navigation and guidance including ‘4D’ navigation
b) Management of aircraft systems
c) Efficient management of fuel
d) Housekeeping management
View Answer
Explanation: The Light Management System performs various functions such as Automatic navigation and guidance including ‘4D’ navigation, Presentation of information, Management of aircraft systems, Efficient management of fuel, Reduction of operating costs. Housekeeping management is a separate system which takes care of air conditioning, entertainment systems, etc.
3. What does the outer loop of an autopilot do?
a) Generate commands to the inner flight control loop
b) Access the flight control surfaces to control the pitch and roll of the aircraft
c) Access the flight control surfaces to control the altitude and heading of the aircraft
d) Generate commands for the pilot to follow
View Answer
Explanation: The autopilot exercises a guidance function in the outer loop and generates commands to the inner flight control loop. These commands are generally attitude commands which operate the aircraft’s control surfaces through a closed flight control loop system so that the aircraft rotates about the pitch and roll axes until the measured pitch and bank angles are equal to the commanded angles. The changes in the aircraft’s pitch and bank angles then cause the aircraft flight path to change through the flight path kinematics.
4. Which of the following is the fundamental control of a common autopilot mode?
a) Altitude control
b) Pitch, roll and yaw control
c) Engine control
d) Automated landing
View Answer
Explanation: The pitch attitude control loop and the heading control loop, with its inner loop commanding the aircraft bank angle, are thus fundamental inner loops in a common autopilot control mode. They are short, fast period loops which continuously control the control surfaces of an aircraft to maintain the pilot command.
5. An altitude control loop does not depend on _______
a) Aircraft pitch angle
b) Angle of attack
c) Forward velocity
d) Density of air
View Answer
Explanation: The altitude control loop works using
6. What is the reason for choosing height error gain in such a way that the frequency of height loop is below the bandwidth of the pitch attitude loop?
a) Efficient flight
b) Better Range
c) Stable and damped response
d) Better climb rate
View Answer
Explanation: The height error gain is chosen so that the frequencymax is well below the bandwidth of pitch attitude loop to ensure a stable and well damped height loop response. If the frequency is high, it might lead to oscillations in the vertical axis.
7. What is ![]()
![]() in
in  for a heading control system?
for a heading control system?
a) Rate of change of heading
b) Bank angle
c) Side slip angle
d) Required rudder deflection
View Answer
Explanation:
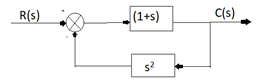
is used assuming the aircraft is in coordinated turn.8. Which of the following is the correct transfer function for?
a) 
b) 
c) 
d) 
View Answer
Explanation: The transfer function of a closed loop system is given by where G(s) is the open loop transfer function and H(s) is the feedback.
Sanfoundry Global Education & Learning Series – Avionics.
To practice all areas of Avionics Problems, here is complete set of 1000+ Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
- Practice Aeronautical Engineering MCQs
- Apply for Aerospace Engineering Internship
- Check Avionics Books
- Practice Aerospace Engineering MCQs
- Check Aerospace Engineering Books
