This set of Machine Dynamics written test Questions & Answers focuses on “Resultant Effect of a System of Forces Acting on a Rigid Body”.
1. Which of the following is incorrect regarding inertia force?
a) Imaginary force
b) Acts upon a rigid body
c) Brings the body to equilibrium
d) Same direction as of accelerating force
View Answer
Explanation: The inertia force is an imaginary force, which on acting upon a rigid body has a tendency to bring it in an equilibrium position. Numerically it is equal to the magnitude of accelerating force, but the direction of this force is opposite.
2. Inertia torque acts in the same direction as the accelerating couple?
a) True
b) False
View Answer
Explanation: The inertia torque is an imaginary torque, which when applied upon the rigid body, brings it in equilibrium position. It is equal to the accelerating couple in magnitude but opposite in direction.
3. If a force has a line of action at a distance h from the centre of gravity, then the value of h is given by _____
a) I. α/F
b) I. α/m.g
c) I/m.k
d) m.k/I
View Answer
Explanation: We know that Force, F = Mass × Acceleration = m.a. and F.h = m.K2.α = I.α
Therefore, h = I. α/F.
4. D-Alembert’s principle is used for which of the following?
a) Change static problem into a dynamic problem
b) Change dynamic problem to static problem
c) To calculate moment of inertia of rigid bodies
d) To calculate angular momentum of a system of masses
View Answer
Explanation: D-Alembert’s principle states that the resultant force acting on a body together with the reversed effective force (or inertia force), are in equilibrium. This principle is used to reduce a dynamic problem into an equivalent static problem.
5. In the expression F – m.a = 0, the term – m.a is called _______
a) Reversed effective force
b) Net force
c) Coriolis force
d) Resultant force
View Answer
Explanation: If the quantity m.a is treated as another force with same line of action as the net force, then the body could be assumed to be in static equilibrium. This force is known as Reversed effective force.
6. Why the inertia torque acts in the opposite direction to the accelerating couple?
a) Bring the body in equilibrium
b) To reduce the accelerating torque
c) Acts as a constraint torque
d) Increase the linear acceleration
View Answer
Explanation: The inertia torque is an imaginary torque, which when applied upon the rigid body, brings it in equilibrium position. It is equal to the accelerating couple in magnitude but opposite in direction.
7. A body remains in equilibrium if ________
a) Inertia force is applied in the same direction to the resultant force
b) Inertia force is applied in the direction opposite to the resultant force
c) Inertia force is applied in the direction Perpendicular to the resultant force
d) Inertia force is applied in the direction Parallel to the resultant force
View Answer
Explanation: Inertia force is an imaginary force which tends to act in the direction opposite to the resultant force to bring the body in equilibrium. Numerically it is equal to the magnitude of accelerating force.
8. Inertia force and the reversed effective force are the same.
a) True
b) False
View Answer
Explanation: The net force m.a is taken as another force acting in the opposite direction to the applied resultant force and is known as inertia force or reversed effective force.
9. In the following picture the G is the center of gravity, the quantity h is known as the “offset”. I is the moment of inertia and k is the radius of gyration. Offset’s value is given by?
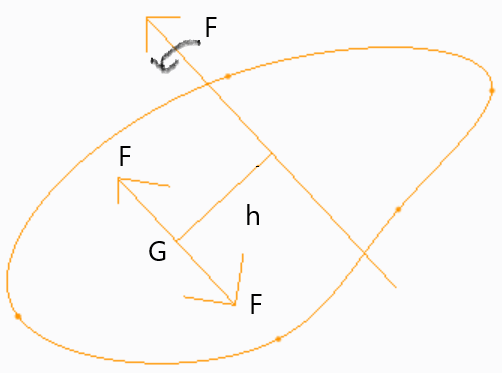
a) I.α/F
b) I.α/m.g
c) I/m.k
d) m.k/I
View Answer
Explanation: We know that Force, F = Mass × Acceleration = m.a. and F.h = m.k2.α = I.α
Therefore, h = I.α/F
10. Considering a four bar chain with each link having linear and angular acceleration, applying D-Alembert’s principle will never result in which of the following member?
a) 2- force member
b) 3- force member
c) 4 – force member
d) Non accelerating member
View Answer
Explanation: Since every link is accelerating it will have inertial torque and inertial force and at least force exerted by a link, thus it can never be a two force member.
Sanfoundry Global Education & Learning Series – Machine Dynamics.
To practice all written questions on Machine Dynamics, here is complete set of 1000+ Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
- Apply for Aerospace Engineering Internship
- Check Dynamics of Machinery Books
- Check Aeronautical Engineering Books
- Check Mechanical Engineering Books
- Apply for Mechanical Engineering Internship
