This set of Machine Dynamics Questions & Answers for Exams focuses on “Synthesis of Four Bar Mechanism for Body Guidance”.
1. Which of the following mathematical tool is used to synthesize the mechanism graphically?
a) Tangent
b) Perpendicular bisector
c) Chord
d) Arc of contact
View Answer
Explanation: When the spatial position of the link or the mechanism is given, then the mathematical tool used to locate the position of joints is the perpendicular bisector.
2. Graphical errors occur during the function generation solely due to choice of wrong scale.
a) True
b) False
View Answer
Explanation: Graphical errors occur during function generation due to the following two reasons:
1. choice of wrong scale
2. wrong graphical procedures.
3. Which of the following given below is not a type of error which could be identified during function regeneration?
a) Structural
b) Mechanical
c) Graphical
d) Theoretical
View Answer
Explanation: When a function is being regenerated, then it is possible that we may encounter structural, Mechanical or simply graphical error but it is not possible to have a theoretical error.
4. Which of the following is not classified under synthesis problem?
a) Body guidance
b) Function generation
c) Path generation
d) Graphical methodology
View Answer
Explanation: Graphical methodology can result in errors in the synthesis of a mechanism hence, it is classified as a synthesis problem. However, the remaining options do not classify as synthesis problems.
5. Order defect can be defined as _________
a) Improper configuration of precision points
b) Non covering of all points by the mechanism
c) Too many configuration points
d) Too many coordinate systems
View Answer
Explanation: Order defect occurs when the precision points are not configured properly. It is to be noted that too many configuration points does not lead to order defect.
6. For errors in function generation, which of the following statement is true?
a) Structural errors are 0 at precision points
b) Structural and mechanical errors are coexistent
c) Increase in precision points will increase structural error
d) Decrease in precision points will decrease structural error
View Answer
Explanation: Precision points are defined as the points where structural errors are 0. Structural errors can be reduced by increasing the number of precision points.
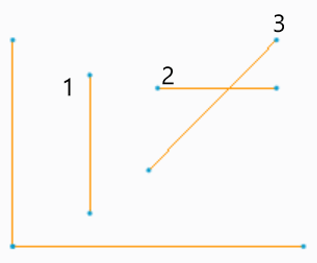
7. If the given axes are Y and X axis and the numbers represent the spatial points, then what will be the position of one of the pivots?
a) Below X axis
b) Above X axis
c) Left of Y axis
d) Between Y axis and 1
View Answer
Explanation: If the points are joined and then a perpendicular bisector of the line formed by the joined points is made to intersect, then the intersection point gives the position of the pivot. In the above figure, it lies below the X axis and in the IVth quadrant.
8. Structural errors are 0 at precision points.
a) True
b) False
View Answer
Explanation: Precision points are known as points having zero structural error, thus increasing the number of structural points will result in decrease in structural error.
9. Which of the following linkage is observed to have branch defect?
a) Grashof type 4 bar linkage
b) Klein constructions
c) Ritterhaus’ constructions
d) Non- Grashof type 4 bar linkage
View Answer
Explanation: Grashof type 4 bar linkage has been oserved to have branch defect. Klein and ritterhau’s construction methods are used to calculate velocity and acceleration of the links in a mechanism.
10. Which method is used in the synthesis of function generation?
a) Overlay method
b) Klein’s method
c) Chebychev’s inequality
d) Freudenstein’s equation
View Answer
Explanation: Overlay method is used in the synthesis of function generation, and it is used to generate precision points in a 4 bar linkage.
Sanfoundry Global Education & Learning Series – Machine Dynamics.
To practice all exam questions on Machine Dynamics, here is complete set of 1000+ Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
- Practice Aeronautical Engineering MCQs
- Check Mechanical Engineering Books
- Check Aeronautical Engineering Books
- Apply for Aerospace Engineering Internship
- Check Dynamics of Machinery Books
