This is a PLC Program to Drive Motor in Forward and Reverse Direction.
Problem Description
A motor is connected to PLC. Run this motor in the Forward and Reverse direction using Ladder Diagram programming language.
Problem Solution
- For any three-phase AC motor, reversing can be accomplished by reversing any two leads. For single-phase motor, reversing start lead with respect to the main leads. And for DC motor, reversing the field leads with respect to the armature leads.
- There are certain ways to reverse the motor. One is to use DPDT (Double Poles, Double Throw) switch and another one is by using Reversing Contactors.
- DPDT switch is best suitable for reversing a small DC motors while Reversing Contactor is used to reverse Three-Phase AC motors.
- Single-phase motors are not widely used for reversing operation. In fact, these are not even available widely with reversing capability.
- As here we have a three-phase AC motor, reversing any two leads will drive the motor in reverse direction.
- Contactor is an electrical switch used for switching an electrical power circuit.
- Two magnetic contactors are used, one for forward connections and the other for reverse connections.
- Only Push Button switches are used to control the direction of this three-phase AC motor.
- We have the input commands to these Push Button switches which are then internally processed by PLC and then there is the output terminal which activates the corresponding relay to energize the relevant magnetic contactors.
- Configure forward and reverse wiring of the motor with contactors such that forward contactor is connected directly in the normal direct phasing of the motor terminal and reverse contactor is connected with two of the motor terminals in the opposite phase.
- When it is switched to reverse direction, forward rotation does not stop instantaneously hence we have to determine what time it takes to completely stop one particular direction. Then provide time delay of a second or two and activate the other contactor.
PLC Program
Here is PLC program to Drive Motor in Forward and Reverse Direction, along with program explanation and run time test cases.
List of Inputs and Outputs I:1/0 = Forward Start (Input) I:1/1 = Reverse Start (Input) I:1/2 = Stop (Input) O:2/14 = Latched coil 1 for forward direction (Output) O:2/0 & O:2/1 = Forward Contactor (Output) T4:1 = Delay before forward direction (Timer) O:2/15 = Latched coil 2 for reverse direction (Output) O:2/2 & O:2/3 = Reverse Contactor (Output) T4:0 = Delay before reverse direction (Timer)
Ladder Diagram to solve this problem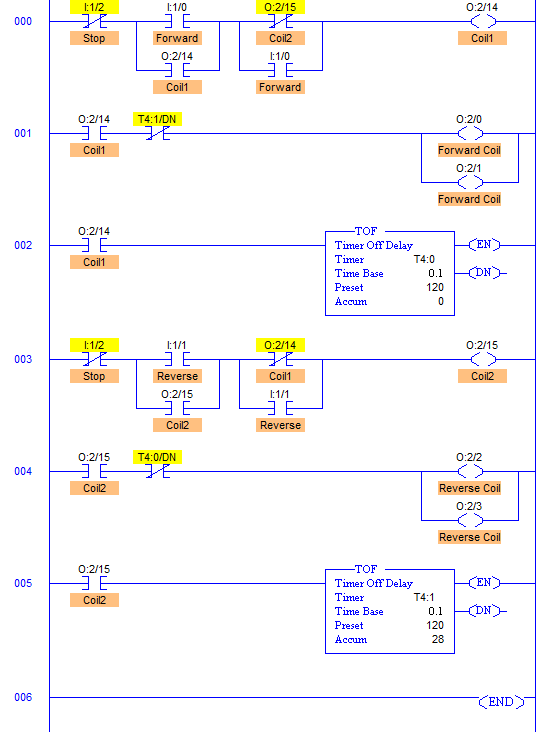
Program Description
- Important thing to note here that basically programmers do not provide time delay for such applications where motor has to be run in forward and reverse directions.
- But when motor supply is cut down, it has an actual breaking during which its speed reduces and then comes to rest.
- So assuming that the motor takes approximately 10secs to come down to its rest state.
- While it is running in the forward direction, O:2/15 coil2 remains de-energized and reverse action is not activated. TOF is used here so input to T4:0 is true hence timer is not activated.
- When I:1/1 is pressed, O:2/14 coil1 energizes making coil2 O:2/15 de-energized.
- When O:2/15 is de-energized, input to timer T4:1 goes true from false and input to T4:0 goes false from true.
- Since TOF is used, when input goes true to false, T4:0 is activated. XIO of T4:0/DN is given to Reverse Coils (O:2/2 and O:2/3) are not energized until timer count is completed. Completion of time delay sets Done bit to low energizing Reversing Coils (O:2/2 and O:2/3).
- Similar operation happens when motor is running in the reverse direction and forward direction input is given.
advertisement
advertisement
Suppose the motor is currently running in the forward direction.
Runtime Test Cases
- Simulation of this problem was successfully performed in software LogixPro of Allen Bradley and verified using I/O Simulator.
- Instead of actual contactors or motor outputs, simple LED outputs were used to perform this in I/O Simulator.
Sanfoundry Global Education & Learning Series – PLC Algorithms.
To practice all PLC programs, here is complete set of 100+ PLC Problems and Solutions.
If you find any mistake above, kindly email to [email protected]
