This set of Digital Signal Processing Multiple Choice Questions & Answers (MCQs) focuses on “Z Transform”.
1. The Z-Transform X(z) of a discrete time signal x(n) is defined as ____________
a) \(\sum_{n=-\infty}^{\infty}x(n)z^n\)
b) \(\sum_{n=-\infty}^{\infty}x(n)z^{-n}\)
c) \(\sum_{n=0}^{\infty}x(n)z^n\)
d) None of the mentioned
View Answer
Explanation: The z-transform of a real discrete time sequence x(n) is defined as a power of ‘z’ which is equal to X(z)=\(\sum_{n=-{\infty}}^{\infty} x(n)z^{-n}\), where ‘z’ is a complex variable.
2. What is the set of all values of z for which X(z) attains a finite value?
a) Radius of convergence
b) Radius of divergence
c) Feasible solution
d) None of the mentioned
View Answer
Explanation: Since X(z) is a infinite power series, it is defined only at few values of z. The set of all values of z where X(z) converges to a finite value is called as Radius of Convergence(ROC).
3. What is the z-transform of the following finite duration signal?
![]()
![]()
a) 2 + 4z + 5z2 + 7z3 + z4
b) 2 + 4z + 5z2 + 7z3 + z5
c) 2 + 4z-1 + 5z-2 + 7z-3 + z-5
d) 2z2 + 4z + 5 +7z-1 + z-3
View Answer
Explanation: We know that, for a given signal x(n) the z-transform is defined as X(z)=\(\sum_{n=-\infty}^{\infty} x(n)z^{-n}\)
Substitute the values of n from -2 to 3 and the corresponding signal values in the above formula
We get, X(z) = 2z2 + 4z + 5 + 7z-1 + z-3.
4. What is the ROC of the signal x(n)=δ(n-k), k>0?
a) z=0
b) z=∞
c) Entire z-plane, except at z=0
d) Entire z-plane, except at z=∞
View Answer
Explanation: We know that, the z-transform of a signal x(n) is X(z)=\(\sum_{n=-\infty}^{\infty} x(n)z^{-n}\)
Given x(n)=δ(n-k)=1 at n=k
=> X(z)=z-k
From the above equation, X(z) is defined at all values of z except at z=0 for k>0.
So ROC is defined as Entire z-plane, except at z=0.
5. What is the z-transform of the signal x(n)=(0.5)nu(n)?
a) \(\frac{1}{1-0.5z^{-1}};ROC |z|>0.5\)
b) \(\frac{1}{1-0.5z^{-1}};ROC |z|<0.5\)
c) \(\frac{1}{1+0.5z^{-1}};ROC |z|>0.5\)
d) \(\frac{1}{1+0.5z^{-1}};ROC |z|<0.5\)
View Answer
Explanation: For a given signal x(n), its z-transform X(z)=\(\sum_{n=-\infty}^{\infty} x(n)z^{-n}\)
Given x(n)=(0.5)nu(n)=(0.5)n for n≥0
So, X(z)=\(\sum_{n=0}^{\infty} 0.5^n z^{-n}=\sum_{n=0}^{\infty} (0.5z^{-1})^n\)
This is an infinite GP whose sum is given as
X(z)=\(\frac{1}{1-0.5z^{-1}}\) under the condition that |0.5z-1|<1
=> X(z)=\(\frac{1}{1-0.5z^{-1}}\) and ROC is |z|>0.5.
6. Which of the following series has an ROC as mentioned below?
a) α-nu(n)
b) αnu(n)
c) α-nu(-n)
d) αnu(n)
View Answer
Explanation:
Let x(n)= αnu(n)
The z-transform of the signal x(n) is given as
X(z)=X(z)=\(\sum_{n=0}^{\infty} \alpha^n z^{-n} = \sum_{n=0}^{\infty}\alpha z^{-1}n\)
=> X(z)=\(\frac{1}{1-\alpha z^{-1}}\) and ROC is |z|>α which is as given in the question.
7. What is the z-transform of the signal x(n) = -αnu(-n-1)?
a) \(\frac{1}{1-\alpha z^{-1}}\);ROC |z|<|α|
b) \(-\frac{1}{1+\alpha z^{-1}}\);ROC |z|<|α|
c) \(-\frac{1}{1-\alpha z^{-1}}\);ROC |z|>|α|
d) \(-\frac{1}{1-\alpha z^{-1}}\);ROC |z|<|α|
View Answer
Explanation: Given x(n)= -αnu(-n-1)=0 for n≥0
=-αn for n≤-1
From the definition of z-transform, we have
X(z)=\(\sum_{n=-\infty}^{-1}(-α^n)z^{-n} = -\sum_{n=-\infty}^{-1}(\alpha^{-1} z)^{-n}=-\frac{1}{1-\alpha z^{-1}}\) and |α-1z|<1 => |z|<|α|.
8. What is the ROC of the z-transform of the signal x(n)= anu(n)+bnu(-n-1)?
a) |a|<|z|<|b|
b) |a|>|z|>|b|
c) |a|>|z|<|b|
d) |a|<|z|>|b|
View Answer
Explanation: We know that,
ROC of z-transform of anu(n) is |z|>|a|.
ROC of z-transform of bnu(-n-1) is |z|<|b|.
By combining both the ROC’s we get the ROC of z-transform of the signal x(n) as |a|<|z|<|b|.
9. What is the ROC of z-transform of finite duration anti-causal sequence?
a) z=0
b) z=∞
c) Entire z-plane, except at z=0
d) Entire z-plane, except at z=∞
View Answer
Explanation: Let us an example of anti causal sequence whose z-transform will be in the form X(z)=1+z+z2 which has a finite value at all values of ‘z’ except at z=∞. So, ROC of an anti-causal sequence is entire z-plane except at z=∞.
10. What is the ROC of z-transform of an two sided infinite sequence?
a) |z|>r1
b) |z|<r1
c) r2<|z|<r1
d) None of the mentioned
View Answer
Explanation: Let us plot the graph of z-transform of any two sided sequence which looks as follows.
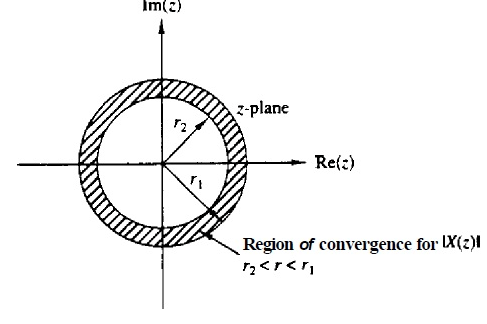
From the above graph, we can state that the ROC of a two sided sequence will be of the form r2 < |z| < r1.
11. The z-transform of a sequence x(n) which is given as X(z)=\(\sum_{n=-\infty}^{\infty}x(n)z^{-n}\) is known as _____________
a) Uni-lateral Z-transform
b) Bi-lateral Z-transform
c) Tri-lateral Z-transform
d) None of the mentioned
View Answer
Explanation: The entire timing sequence is divided into two parts n=0 to ∞ and n=-∞ to 0.
Since the z-transform of the signal given in the questions contains both the parts, it is called as Bi-lateral z-transform.
12. What is the ROC of the system function H(z) if the discrete time LTI system is BIBO stable?
a) Entire z-plane, except at z=0
b) Entire z-plane, except at z=∞
c) Contain unit circle
d) None of the mentioned
View Answer
Explanation: A discrete time LTI is BIBO stable, if and only if its impulse response h(n) is absolutely summable. That is,
\(\sum_{n=-\infty}^{\infty}|h(n)|<\infty\)
We know that, H(z)= \(\sum_{n=-\infty}^{\infty}h(n)z^{-n}\)
Let z=ejω so that |z|=|ejω|=1
Then, |H(ejω)|=|H(ω)|=| \(\sum_{n=-\infty}^{\infty}\)h(n) e-jωn|≤\(\sum_{n=-\infty}^{\infty}\)|h(n) e-jωn|
=\(\sum_{n=-\infty}^{\infty}\)|h(n)|<∞
Hence, we see that if the system is stable, then H(z) converges for z=ejω. That is, for a stable discrete time LTI system, ROC of H(z) must contain the unit circle |z|=1.
13. The ROC of z-transform of any signal cannot contain poles.
a) True
b) False
View Answer
Explanation: Since the value of z-transform tends to infinity, the ROC of the z-transform does not contain poles.
14. Is the discrete time LTI system with impulse response h(n)=an(n) (|a| < 1) BIBO stable?
a) True
b) False
View Answer
Explanation: Given h(n)=an(n) (|a|<1)
The z-transform of h(n) is H(z)=\(\frac{z}{z-a}\), ROC is |z|>|a|
If |a|<1, then the ROC contains the unit circle. So, the system is BIBO stable.
15. What is the ROC of a causal infinite length sequence?
a) |z|<r1
b) |z|>r1
c) r2<|z|<r1
d) None of the mentioned
View Answer
Explanation: The ROC of causal infinite sequence is of form |z|>r1 where r1 is largest magnitude of poles.
Sanfoundry Global Education & Learning Series – Digital Signal Processing.
To practice all areas of Digital Signal Processing, here is complete set of 1000+ Multiple Choice Questions and Answers.
If you find a mistake in question / option / answer, kindly take a screenshot and email to [email protected]
